|
|
Przy opisie ruchu posługujemy się pojęciem
układu współrzędnych,
który wiążemy z wybranym przez nas układem odniesienia. Opis ruchu
polega na przyporządkowaniu danemu punktowi ![]() zespołu liczb określających w każdej chwili czasu w jednoznaczny sposób
jego położenie w przestrzeni oraz kierunek i wartość jego prędkości i
przyspieszenia. Wybór układu odniesienia oraz odpowiedniego układu współrzędnych
zależy od rodzaju opisywanego ruchu. Specyfika ruchu często sugeruje wybór
odpowiedniego układu współrzędnych.
zespołu liczb określających w każdej chwili czasu w jednoznaczny sposób
jego położenie w przestrzeni oraz kierunek i wartość jego prędkości i
przyspieszenia. Wybór układu odniesienia oraz odpowiedniego układu współrzędnych
zależy od rodzaju opisywanego ruchu. Specyfika ruchu często sugeruje wybór
odpowiedniego układu współrzędnych.
 |
| Rys. 2.1.
Punkt |
Położenie ciała w układzie współrzędnych prostokątnych określone
jest przez podanie trzech liczb określających współrzędne wektora położenia
![]() względem początku układu
względem początku układu
![]() na trzech przecinających
się w tym punkcie prostopadłych do siebie prostych zwanych osiami
na trzech przecinających
się w tym punkcie prostopadłych do siebie prostych zwanych osiami ![]() .
Układ jest prawoskrętny, kiedy obrót osi
.
Układ jest prawoskrętny, kiedy obrót osi ![]() w kierunku osi
w kierunku osi ![]() wyznacza kierunek
osi
wyznacza kierunek
osi ![]() zgodnie z regułą
śruby prawoskrętnej. Pokazany na rysunku układ jest układem prawoskrętnym.
zgodnie z regułą
śruby prawoskrętnej. Pokazany na rysunku układ jest układem prawoskrętnym.
Wektor położenia w układzie prostokątnym jest więc sumą wektorową
wersorów ![]() pomnożonych
przez odpowiadające im składowe promienia wodzącego:
pomnożonych
przez odpowiadające im składowe promienia wodzącego:
|
|
(2.1) |
Długość wektora położenia jest liczbą dodatnią i wynosi
|
|
(2.2) |
 |
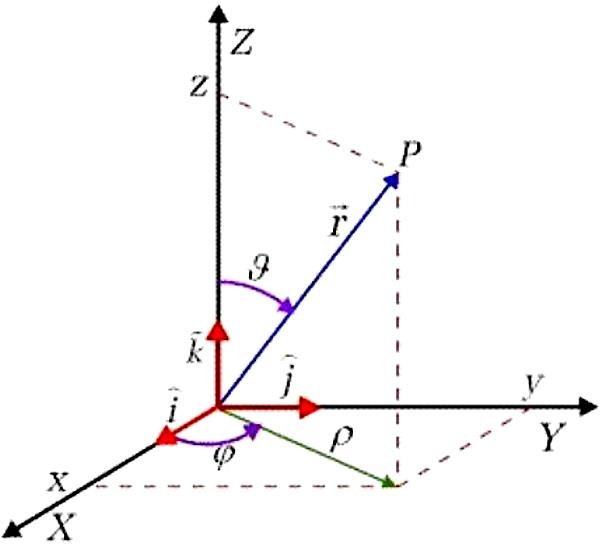
Wektor położenia w układzie sferycznym: | |
|
(2.3) |
||
| Współrzędne w układzie prostokątnym wyrażone przez współrzędne sferyczne: | ||
|
|
||
|
|
(2.4) | |
|
|
||
| Współrzędne w układzie sferycznym wyrażone przez współrzędne prostokątne: | ||
|
|
||
|
|
(2.5) | |
 |
||
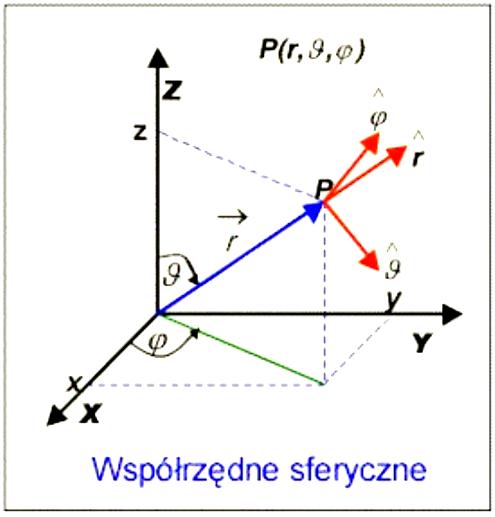
| Rys. 2.2.
Punkt |
||
W układzie tym położenie ciała określone jest przez
podanie długości rzutu promienia wodzącego na płaszczyznę ![]() oznaczonego
jako
oznaczonego
jako ![]() ,
kąta
,
kąta
![]() jaki
tworzy rzut
jaki
tworzy rzut ![]() z osią
z osią ![]() oraz współrzędnej
oraz współrzędnej ![]() . Wersor współrzędnej
. Wersor współrzędnej
![]() skierowany jest zawsze wzdłuż kierunku rzutu promienia wodzącego na płaszczyznę
skierowany jest zawsze wzdłuż kierunku rzutu promienia wodzącego na płaszczyznę
![]() , kierunek
wersora kąta
, kierunek
wersora kąta ![]() określony jest przez aktualny kierunek zmiany tego kąta,
wersor współrzędnej
określony jest przez aktualny kierunek zmiany tego kąta,
wersor współrzędnej ![]() zachowuje stały kierunek, podobnie jak w układzie współrzędnych prostokątnych.
(patrz Rys.2.3)
zachowuje stały kierunek, podobnie jak w układzie współrzędnych prostokątnych.
(patrz Rys.2.3)
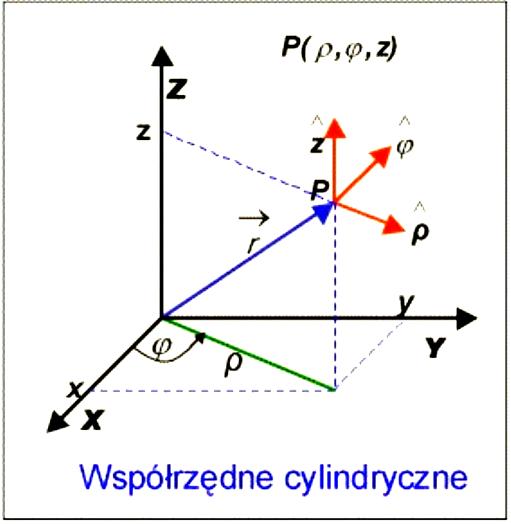 |
Wektor położenia w układzie współrzędnych cylindrycznych: | |
|
(2.6) |
||
| Współrzędne w układzie prostokątnym wyrażone przez współrzędne cylindryczne: | ||
|
|
||
|
|
(2.7) | |
|
|
||
| Współrzędne w układzie cylindrycznym wyrażone przez współrzędne prostokątne: | ||
|
|
||
|
|
(2.8) | |
|
|
||
| Rys. 2.3.
Punkt |
||
Układ współrzędnych cylindrycznych będziemy stosować do opisu ruchu ciał wokół zadanej osi w przestrzeni trójwymiarowej i w przypadkach, kiedy siły działające w przestrzeni mają symetrię walcową.
Kiedy ruch odbywa się w jednej płaszczyźnie nazywamy go
ruchem płaskim. Możemy zawsze tak dobrać osie układu współrzędnych, by
odbywał się w płaszczyźnie przez nas zadanej, np. ![]() .
Ruch płaski możemy traktować jako szczególny przypadek ruchu
przestrzennego, kiedy w układzie prostokątnym i cylindrycznym współrzędna
równa jest zeru, a w układzie sferycznym kąt
J
równy jest p/2.
.
Ruch płaski możemy traktować jako szczególny przypadek ruchu
przestrzennego, kiedy w układzie prostokątnym i cylindrycznym współrzędna
równa jest zeru, a w układzie sferycznym kąt
J
równy jest p/2.
Do opisu ruch płaskiego stosujemy często układ współrzędnych biegunowych. W układzie tym położenie punktu wyrażone jest przez dwie liczby: długość promienia wodzącego r i kąt obrotu j, liczony względem osi X. Wersor promienia wodzącego skierowany jest wzdłuż jego kierunku; wersor kąta j jest do niego prostopadły (patrz Rys.2.4)
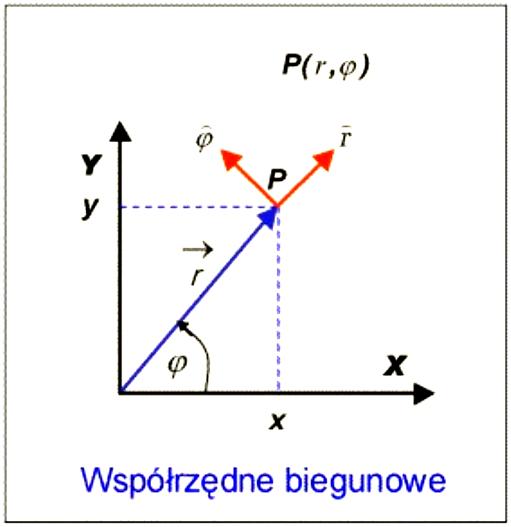 |
Wektor położenia w układzie współrzędnych biegunowych: | |
|
(2.9) |
||
| Współrzędne w dwuwymiarowym układzie prostokątnym wyrażone przez współrzędne biegunowe: | ||
|
|
(2.10) |
|
| Współrzędne w układzie biegunowym wyrażone przez współrzędne prostokątne: | ||
 |
(2.11) | |
| Rys. 2.4.
Punkt |
||
Układ współrzędnych biegunowych będziemy stosować do opisu ruchu ciał wokół zadanego punktu w przestrzeni dwuwymiarowej i w przypadkach, kiedy siły działające w płaszczyźnie mają symetrię obrotową.