|
1. Rozkłady dwóch zmiennych losowych
|
 |
Zaczynamy tak samo, jak w przypadku jednej zmiennej.
Potem zobaczymy, że rozkłady dwóch
i wielu zmiennych losowych zawierają nowe
elementy nie będące tylko uogólnieniem wiedzy o rozkładach jednowymiarowych.
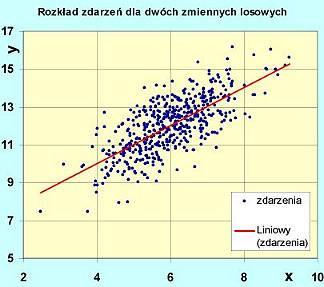
<==( Przykład rozkładu zdarzeń dla dwóch zmiennych losowych obrazuje rysunek obok.
Zdarzeniami mogą być np. wystąpienia opadów
deszczu w funkcji położenia i w funkcji czasu.
Zapiszmy wyrażenie określające dystrybuantę dla przypadku dwóch zmiennych losowych.
|
|

|
(3.1.1) |
|
Jeśli F jest funkcją ciągłą zmiennych x i y,
to możemy zdefiniować łączną gęstość
prawdopodobieństwa zmiennych losowych
 . .
|
 |
(3.1.2) |
Prawdopodobieństwo, że zdarzenie określone przez dane wartości zmiennych losowych
znajdzie się w przedziale zmiennej x
pomiędzy wartościami a i b, a w przedziale zmiennej
y pomiędzy c i d
wynosi
 |
(3.1.3) |
Kiedy interesuje nas rozkład zdarzeń w funkcji jednej zmiennej tylko (np. prawdopodobieństwo
opadów deszczu dla różnych
szerokości geograficznych) to należy przecałkować dwuwymiarowy rozkład gęstości
prawdopodobieństwa po wszystkich wartościach
drugiej zmiennej
 |
(3.1.4) |
gdzie
 |
(3.1.5 |
jest gęstością prawdopodobieństwa zmiennej losowej
 .
Taki rozkład nazywa się rozkładem brzegowym zmiennej
.
Oczywiście, analogicznie możemy określić rozkład brzegowy zmiennej
.
Taki rozkład nazywa się rozkładem brzegowym zmiennej
.
Oczywiście, analogicznie możemy określić rozkład brzegowy zmiennej
 .
.
 |
(3.1.6) |
Rozkład brzegowy jest więc rzutem rozkładu dwuwymiarowego na jedną z osi.
Podobnie jak w rachunku prawdopodobieństwa określa się niezależność zdarzeń
warunkiem by ich łączne prawdopodobieństwo było
iloczynem prawdopodobieństw poszczególnych zdarzeń, tak i dwie zmienne losowe uważamy
za niezależne jeżeli
 |
(3.1.7) |
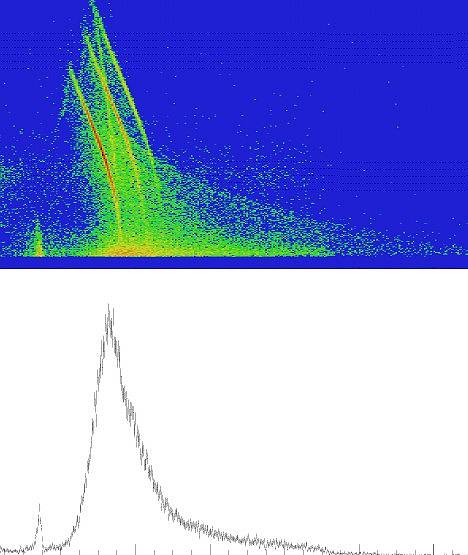
Rysunek poniżej prezentuje przykład rozkładu dwuwymiarowego oraz jednego z
rozkładów brzegowych.
Funkcje dwóch zmiennych losowych
Podobnie, jak w przypadku jednej zmiennej losowej definiujemy wartość oczekiwaną
funkcji H(x,y) dwóch zmiennych
losowych
 |
(3.1.8) |
Analogicznie określamy też wariancję
 |
(3.1.9) |
Wartości oczekiwane i wariancje niektórych funkcji są szczególnie interesujące.
Jeśli funkcja H zdefiniowana jest w
postaci
 |
(3.1.10) |
to wartości oczekiwane, które oznaczymy symbolem
 ,
tak zdefiniowanej funkcji nazywamy momentami rzędu l i m
względem .
Mamy więc
,
tak zdefiniowanej funkcji nazywamy momentami rzędu l i m
względem .
Mamy więc
 |
(3.1.11) |
Zauważamy natychmiast, że
 |
(3.1.12) |
Kiedy więc funkcję H zdefiniujemy jako
 |
(3.1.13) |
to wartości oczekiwane tej funkcji
 , czyli
, czyli
 |
(3.1.14) |
stanowią momenty rzędu l i m
względem punktów a i b. Kiedy zaś
 ,
a
,
a  ,
to otrzymujemy momenty względem wartości
oczekiwanych poszczególnych zmiennych,
,
to otrzymujemy momenty względem wartości
oczekiwanych poszczególnych zmiennych,
 :
:
 . . |
(3.1.15) |
Nietrudno zauważyć, że
 . . |
(3.1.16) |
oraz, że
 . . |
(3.1.17) |
Elementem nowym w naszych rozważaniach, nie mającym odpowiednika w przypadku rozkładów
jednej zmiennej jest moment
 . . |
(3.1.18) |
Wielkość ta zwana jest kowariancją i charakteryzuje korelacje pomiędzy zmiennymi
odgrywając bardzo ważna rolę w analizie
danych. Zauważmy, że kowariancja ma wartość dodatnią wtedy, kiedy równocześnie
 oraz
oraz  ,
zaś ma wartość ujemną gdy przy
mamy
,
zaś ma wartość ujemną gdy przy
mamy
 .
Oczywiście, kowariancja stanowi wartość uśrednioną
i opisuje zbiór wszystkich rozpatrywanych zdarzeń. Kiedy wartości jednej zmiennej nie
mają wpływu na wartości drugiej, czyli zmienne
te nie są skorelowane, to kowariancja równa jest zeru.
.
Oczywiście, kowariancja stanowi wartość uśrednioną
i opisuje zbiór wszystkich rozpatrywanych zdarzeń. Kiedy wartości jednej zmiennej nie
mają wpływu na wartości drugiej, czyli zmienne
te nie są skorelowane, to kowariancja równa jest zeru.
Wygodna w użyciu jest wielkość zwana
współczynnikiem korelacji i zdefiniowana następująco
 . . |
(3.1.19) |
Współczynnik korelacji charakteryzuje współzależność zmiennych
przyjmując wartości z przedziału
 .
.
Zapiszmy wartość oczekiwana i wariancję dla funkcji dwóch zmiennych losowych postaci
 . . |
(3.1.20) |
gdzie a i b mają wartości stałe. Wartość oczekiwana tej funkcji wynikająca z definicji (1.3.8) może
być zapisana w postaci
 . . |
(3.1.21) |
Wariancję zapisujemy zgodnie ze wzorem (1.3.9)
 |
(3.1.22) |
czyli
 |
(3.1.23) |
Zauważmy, że wariancja sumy dwóch zmiennych losowych tylko wtedy równa jest sumie ich wariancji, pomnożonych przez kwadraty
odpowiednich stałych, jeśli znika kowariancja, tj. jeśli zmienne te nie są skorelowane.