 |
 |
|
|
|
Siła przywracająca ciało do położenia równowagi zależna jest od wielkości odchylenia i jeśli odkształcenia są doskonale sprężyste, wyrażona jest przez znane nam już prawo Hooke'a (patrz wzór (3.28) oraz animacja powyżej.)
|
Jeżeli współczynnik ten nie zmienia się w czasie ruchu, to wartość siły jest wprost proporcjonalna do wielkości odchylenia od położenia równowagi. Ruch odbywający się pod wpływem takiej siły nazywamy ruchem harmonicznym, a siły o tej własności nazywamy siłami harmonicznymi. Proporcjonalność siły do odchylenia jest najbardziej charakterystyczną własnością, wspólną dla wszystkich sił harmonicznych, mimo że siły te nie ograniczają się wyłącznie do sił sprężystości. Znak minus oznacza, że kierunek siły jest przeciwny do kierunku odchylenia.
| (6.2) |
Przepiszemy to równanie w postaci
|
Równanie (6.2a) jest równaniem różniczkowym drugiego rzędu. Niewiadomą w tym równaniu jest odchylenie od położenia równowagi x, a ściślej mówiąc, zależność tego odchylenia od czasu t.
Poszukujemy więc takiej funkcji
x=f(t), której druga pochodna d2x/dt2 równa
jest jej samej wziętej ze znakiem minus i pomnożonej przez pewną stałą, którą
oznaczyliśmy przez w2.
Jaka funkcja ma taką właściwość? Oczywiście - funkcje, sinus
i cosinus. Nietrudno sprawdzić, że podany wyżej warunek zostanie
zachowany także jeśli funkcje te pomnożymy przez stały czynnik, a do
argumentu dodamy dowolną stałą.
|
|
(6.4) |
gdzie A oraz j, to wartości stałe, nie zmieniające się w czasie.
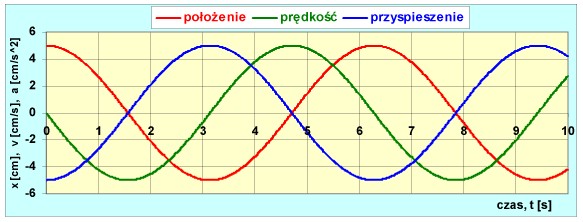
Liczymy pierwszą pochodną, czyli dx/dt. Zwróćmy uwagę, że pierwsza pochodna położenia po czasie to po prostu chwilowa prędkość ciała, u.
|
|
(6.5) |
Druga pochodna, czyli przyspieszenie ciała a, wynosi
|
|
(6.6) |
Przeanalizujmy teraz sens fizyczny stałych: A, w oraz j. Stałe te stanowią parametry naszego rozwiązania.
Pamiętamy, że maksymalna i minimalna wartość funkcji sinus i cosinus to +1 i -1.|
Maksymalne odchylenie ciała od położenia równowagi,
które możemy wyrazić np. w centymetrach , określone jest przez odchylenie
początkowe i wyrażone jest poprzez wartość stałej A. Wymiar tej stałej
jest taki sam, jak wymiar odchylenia. Stała A, to amplituda
w ruchu harmonicznym.
Wielkość w, którą zdefiniowaliśmy
już wcześniej nazywa się częstością drgań własnych
układu. Wielkość ta jest zasadniczą charakterystyką układu wykonującego
drgania pod wpływem siły harmonicznej. Określona jest wzorem (6.3) przez własności
tej siły ( współczynnik k) oraz samego układu (masa m)
.
Zauważmy teraz, że jeśli argument funkcji cosinus w formule (6.6)
zmienimy o wielokrotność 2p, to wartość
funkcji nie zmieni się, bo takie są własności funkcji sinus i cosinus.
Aby zaś wyrażenie w nawiasie formuły (6.6) wzrosło o 2p
musimy czas t zwiększyć o 2p/w
(sprawdź to). Po okresie czasu 2p/w ciało
przyjmie znów to samo położenie. Sytuacja będzie powtarzać się po
kolejnych, takich samych przyrostach czasu. Przedział czasu to okres w ruchu harmonicznym i wyraża się w
jednostkach czasu czyli np. w sekundach. Wielkość w
łączy z okresem zależność (7) czyli w=2p/T.
Odwrotność okresu
nazywa się częstotliwością w ruchu harmonicznym. Jest to liczba okresów T w jednostce czasu. Wymiarem częstotliwości jest 1/s; jednostką jest 1 herc (Hz), Częstotliwość drgań wynosi 1Hz, kiedy czas trwania jednego okresu równy jest jednej sekundzie. Stała j, to faza
początkowa naszego ruchu. Wraz z wartością amplitudy określa ona
wychylenie w chwili początkowej tj. dla t=0. Zauważmy, że jeśli
faza początkowa będzie równa -p/2, to otrzymamy z
równania (4)
czyli dla t=0 wychylenie będzie x=0. Oczywiście, jeśli
do wartości fazy początkowej dodamy liczbę będącą wielokrotnością kąta
pełnego 360o czyli 2p, to
uzyskamy to samo wychylenie, x. |
| MS-Excel | Interaktywna ilustracja graficzna |
Kliknij w polu rysunku. |
|
|
||
| Rys.12.4. Położenie, prędkośc i przyspieszenie w ruchu harmonicznym. | ||