From Łukasz Graczykowski
(Difference between revisions)
|
|
| (24 intermediate revisions not shown) |
| Line 1: |
Line 1: |
| | + | {| align="right" |
| | + | | __TOC__ |
| | + | |} |
| | | | |
| - | March 16, 2012, Friday, 75
| |
| - | Majanik | My talk | My preferences | My watchlist | My contributions | Log out
| |
| - |
| |
| - | Navigation
| |
| - | Main page
| |
| - | C++
| |
| - | KADD
| |
| - | Aliroot Tutorial
| |
| - | About
| |
| | | | |
| - | KADD Laboratorium 5
| + | == Zadanie == |
| | + | Wykonano pomiary trzech wielkości fizycznych <code>X1, X2</code> oraz <code>X2</code>. Wyniki pomiarów znajdują się w plikach: [http://www.if.pw.edu.pl/~lgraczyk/wiki/images/e/ed/Dane1.dat Dane1.dat], [http://www.if.pw.edu.pl/~lgraczyk/wiki/images/0/0d/Dane2.dat Dane2.dat] oraz [http://www.if.pw.edu.pl/~lgraczyk/wiki/images/b/ba/Dane3.dat Dane3.dat]. |
| | | | |
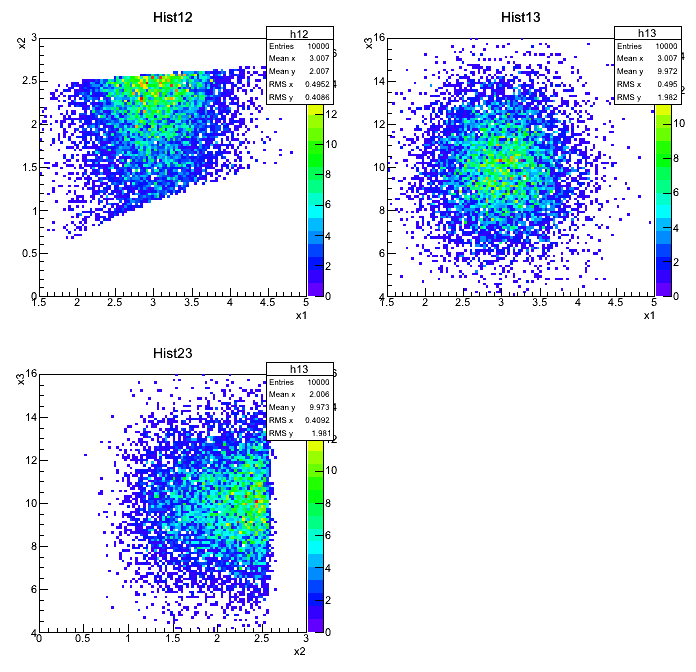
| | + | * Należy określić wynik pomiaru (średnia oraz niepewność - odchylenie standardowe) tych wielkości oraz narysować wykresy zależności między zmiennymi <code>(X1, X2)</code>, <code>(X2, X3)</code> oraz <code>(X1, X3)</code>. (1 pkt) |
| | | | |
| - | Please note that all contributions to MJanik may be edited, altered, or removed by other contributors. If you do not want your writing to be edited mercilessly, then do not submit it here.
| + | Wielkości fizyczne <code>Y1, Y2</code> związane są z wielkościami <code>X1, X2, X3</code> następującymi relacjami: |
| - | You are also promising us that you wrote this yourself, or copied it from a public domain or similar free resource (see MJanik:Copyrights for details). Do not submit copyrighted work without permission!
| + | |
| - | Summary:
| + | <code> Y1 = 2 X1 + 5 X2 + X3 |
| - | This is a minor edit Watch this page | + | |
| - | Cancel | Editing help (opens in new window)
| + | Y2 = 3 + 0.5 X1 + 4 X2</code> |
| - | Page Discussion Edit History Delete Move Protect Watch
| + | |
| - | What links here | Related changes | Upload file | Special pages
| + | Należy wyznaczyć: |
| - | Privacy policy | About MJanik | Disclaimers | Design by Paul Gu
| + | * macierz kowariancji zmiennych X1, X2, X3 (1 pkt) |
| | + | * zmierzone wartości średnie zmiennych Y1, Y2 w pomiarze pośrednim (0.5 pkt) |
| | + | * macierz kowariancji zmiennych Y1, Y2 (1pkt) |
| | + | * błędy z jakimi zmierzono pośrednio wielkości Y1, Y2 (1 pkt) |
| | + | * wpółczynnik korelacji pomiędzy zmiennymi Y1 i Y2 (0.5 pkt) |
| | + | |
| | + | == Uwagi == |
| | + | * Wczytywanie danych z pliku (tak samo jak w języku C++): |
| | + | ifstream ifile; |
| | + | ifile.open("dane.dat"); |
| | + | double val; |
| | + | while(ifile>>val) |
| | + | { |
| | + | cout<<val<<endl; |
| | + | } |
| | + | ifile.close(); |
| | + | |
| | + | * Do wszystkich operacji na macierzach (tworzenie macierzy kowariancji, mnożenie macierzy, transponowanie macierzy) - polecana jest klasa <code>TMatrixD</code> |
| | + | * [http://pl.wikibooks.org/wiki/Statystyka_matematyczna/Momenty_statystyczne_w_dzia%C5%82aniu Wikibooks] |
| | + | |
| | + | == Wynik == |
| | + | Wykresy: |
| | + | [[File:Lab05_KADD2012.png]] |
| | + | |
| | + | Output: |
| | + | X1=3.00691+/-0.495242 |
| | + | X2=2.00581+/-0.40909 |
| | + | X3=9.97287+/-1.98102 |
| | + | rho(X1,X2)=0.156132 |
| | + | rho(X1,X3)=-0.00698853 |
| | + | rho(X2,X3)=0.00875851 |
| | + | |
| | + | To jest macierz kowariancji wielkosci X |
| | + | 3x3 matrix is as follows |
| | + | |
| | + | | 0 | 1 | 2 | |
| | + | -------------------------------------------- |
| | + | 0 | 0.2453 0.0316 -0.006855 |
| | + | 1 | 0.0316 0.1674 0.0071 |
| | + | 2 | -0.006855 0.0071 3.924 |
| | + | |
| | + | To jest macierz kowariancji wielkosci Y |
| | + | 2x2 matrix is as follows |
| | + | |
| | + | | 0 | 1 | |
| | + | ------------------------------- |
| | + | 0 | 9.765 3.949 |
| | + | 1 | 3.949 2.865 |
| | + | |
| | + | Y1=26.0157+/-9.76487 |
| | + | Y2=12.5267+/-2.86537 |
| | + | rho(Y1,Y2)=0.746574 |
| | + | rho(Y2,Y1)=0.746574 |
Latest revision as of 13:06, 19 March 2012
Zadanie
Wykonano pomiary trzech wielkości fizycznych X1, X2 oraz X2. Wyniki pomiarów znajdują się w plikach: Dane1.dat, Dane2.dat oraz Dane3.dat.
- Należy określić wynik pomiaru (średnia oraz niepewność - odchylenie standardowe) tych wielkości oraz narysować wykresy zależności między zmiennymi
(X1, X2), (X2, X3) oraz (X1, X3). (1 pkt)
Wielkości fizyczne Y1, Y2 związane są z wielkościami X1, X2, X3 następującymi relacjami:
Y1 = 2 X1 + 5 X2 + X3
Y2 = 3 + 0.5 X1 + 4 X2
Należy wyznaczyć:
- macierz kowariancji zmiennych X1, X2, X3 (1 pkt)
- zmierzone wartości średnie zmiennych Y1, Y2 w pomiarze pośrednim (0.5 pkt)
- macierz kowariancji zmiennych Y1, Y2 (1pkt)
- błędy z jakimi zmierzono pośrednio wielkości Y1, Y2 (1 pkt)
- wpółczynnik korelacji pomiędzy zmiennymi Y1 i Y2 (0.5 pkt)
Uwagi
- Wczytywanie danych z pliku (tak samo jak w języku C++):
ifstream ifile;
ifile.open("dane.dat");
double val;
while(ifile>>val)
{
cout<<val<<endl;
}
ifile.close();
- Do wszystkich operacji na macierzach (tworzenie macierzy kowariancji, mnożenie macierzy, transponowanie macierzy) - polecana jest klasa
TMatrixD
- Wikibooks
Wynik
Wykresy:
Output:
X1=3.00691+/-0.495242
X2=2.00581+/-0.40909
X3=9.97287+/-1.98102
rho(X1,X2)=0.156132
rho(X1,X3)=-0.00698853
rho(X2,X3)=0.00875851
To jest macierz kowariancji wielkosci X
3x3 matrix is as follows
| 0 | 1 | 2 |
--------------------------------------------
0 | 0.2453 0.0316 -0.006855
1 | 0.0316 0.1674 0.0071
2 | -0.006855 0.0071 3.924
To jest macierz kowariancji wielkosci Y
2x2 matrix is as follows
| 0 | 1 |
-------------------------------
0 | 9.765 3.949
1 | 3.949 2.865
Y1=26.0157+/-9.76487
Y2=12.5267+/-2.86537
rho(Y1,Y2)=0.746574
rho(Y2,Y1)=0.746574
